Cory Dyer
Bachelor of Engineering, Honours
Major in Mechatronics
I am an extremely driven and creative individual. Currently, I am seeking a software engineering position to complement my Mechatronics degree from Massey University and leverage my work experience as a Software Engineer in the fields of Robotics and Automation. Through practical application, I have developed a deep understanding of the engineering process and gained valuable experience in robotics. This journey has honed my proficiency in multiple coding languages, CAD software, and report writing, and has also included working in a full-stack development environment, building and maintaining both frontend and backend systems.
My Experience.
-
WideSky (2023-Present)
Software Engineer
Brisbane, Australia
-
Robotics Plus (2021-2023)
Graduate Software Engineer &
Mechatronics Intern
-
Zespri (2020-2021)
Software Intern
-
Massey University (2019-2022)
Bachelor of Engineering, Honours
Major in Mechatronics
Technical Skills.
- Python, TypeScript/JavaScript, C/C++, C#
- Full-Stack Web Development
- Embedded Systems & Robotics
- CI/CD, Docker, GitHub Actions
- Agile Development, Knowledge Share
My Background.
Over more than eight years of competing in robotics, I developed a diverse set of skills that laid a strong foundation for my success as a software engineer. Working closely in teams of varying sizes, skill levels, and disciplines sharpened my ability to adapt, collaborate, and communicate effectively in technical environments. These experiences cultivated a holistic, team-oriented approach to problem-solving that continues to serve me well in professional contexts.
Robotics exposed me to the complexities of both software and hardware integration, where I gained hands-on experience in C/C++, API design, version control, and technical documentation. Iterative design and build cycles deepened my understanding of mechanical systems and gave me valuable insight into cross-disciplinary collaboration—particularly between hardware and software teams. This early exposure helped me build confidence working across technical stacks and communicating clearly about complex systems.
Since transitioning into industry, I've spent the past four years working as a full-stack software engineer as well as a software engineer in the fields of robotics and automation. I've contributed to both backend and frontend systems, developed production-grade software, and worked closely with cross-functional teams to deliver integrated solutions. My foundation in robotics has evolved into a pragmatic, real-world skill set—combining low-level systems knowledge with modern software development practices to solve challenging engineering problems with impact and efficiency.
My Best Projects. (click for info)
Vex Robotics
Competing For Over 8 Years

Vex Robotics
Competing For Over 8 Years
In my time competing I was able to make it to the World Championships in America for three consecutive years, after winning the National Championships in New Zealand against 70+ teams. At the World's level, we were division quarter finalists in 2018 and received the Worlds Community award in 2019 for our STEM outreach efforts. At the national level, in 2018 we were tournament champions and received the Design Notebook award for best design process and documentation. The following year, we were tournament finalists and received the Excellence Award for the best overall team ranking, robot program, build quality, and design. This is the highest award possible in the competition.
As VEX is a highschool program, once I graduated college I put my full effort into mentoring teams and promoting robotics. During the university year I mentored teams in Palmerston North, most notably, Palmerston North Girls' High School and St. Peters. To promote robotics in the region, I assisted in running events, helped teams and most importantly talked to local parents and teachers in attendance. This mentoring also extended to teams in the Bay of Plenty region when home from university.
Code (Currently not maintained by me)
Robot:
https://github.com/hazzery/2941A-TippingPoint
Design Notebook (2018):
https://docs.google.com/document/d/16_aSm6f0YmVJJF7Gtnbw23u26G7xl968/edit?usp=sharing&ouid=109424885984740909527&rtpof=true&sd=true
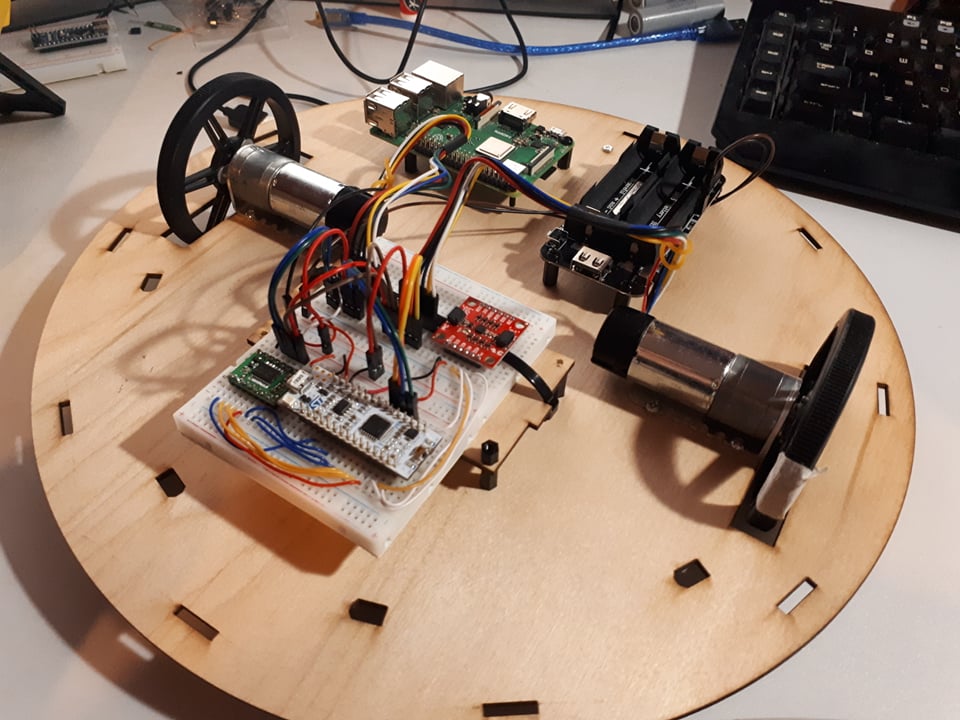
Autonomous Robot
A University Project
Autonomous Robot
A University Project
In 2021, as part of my degree, teams were presented with the problem of creating an autonomous robot to navigate a room. My team developed our solution in three parts: high level control of the robot and its path, direct control of the hardware and robot position, and a user interface where we could see the status of the robot and give instructions. High level control of the robot was achieved using a Raspberry Pi, programmed with a custom Real Time Operating System to receive data from a LiDAR and user input over Wi-Fi to inform its overall path. Direct control was done via a Nucleo f303k8 board, which was programmed using a custom pure pursuit algorithm and encoder/gyroscope odometry. The motherboard (Raspberry Pi), was in constant communication with the daughter board to give movement instructions and verify local position data with the global position. This project improved my coding skills in Assembly and C/C++, and gave me experience creating a user interface in C# for Windows and Android.
Code
Daughter Board:
https://github.com/cjdyer/Roomba-F303K8-Drive-Controller
Kiwifruit Recognition for Zespri
Internship Project

Kiwifruit Recognition for Zespri
Internship Project
In the summer of 2020, I had the opportunity to work at Zespri, where my main task involved developing a kiwifruit recognition system. Initially, we explored the potential of using artificial intelligence. However, it became evident early on that this approach worked well only in ideal lighting conditions, failing to perform adequately under low-light situations. To overcome this challenge, I implemented a colour analysis algorithm with an object permanence map, which significantly improved the results in all trial runs. Building on this success, I proceeded to develop C++ code that transformed Time-of-Flight camera data into a 3D model. This 3D model was further analysed using a custom plugin for Blender, allowing for precise edge detection. To ensure seamless integration, the 3D model data was then matched and combined with the regular camera data. Finally, to provide a user-friendly interface, I created a C# application to present the processed information to the end-users. This application allowed them to interact with and utilise the kiwifruit recognition system effectively.
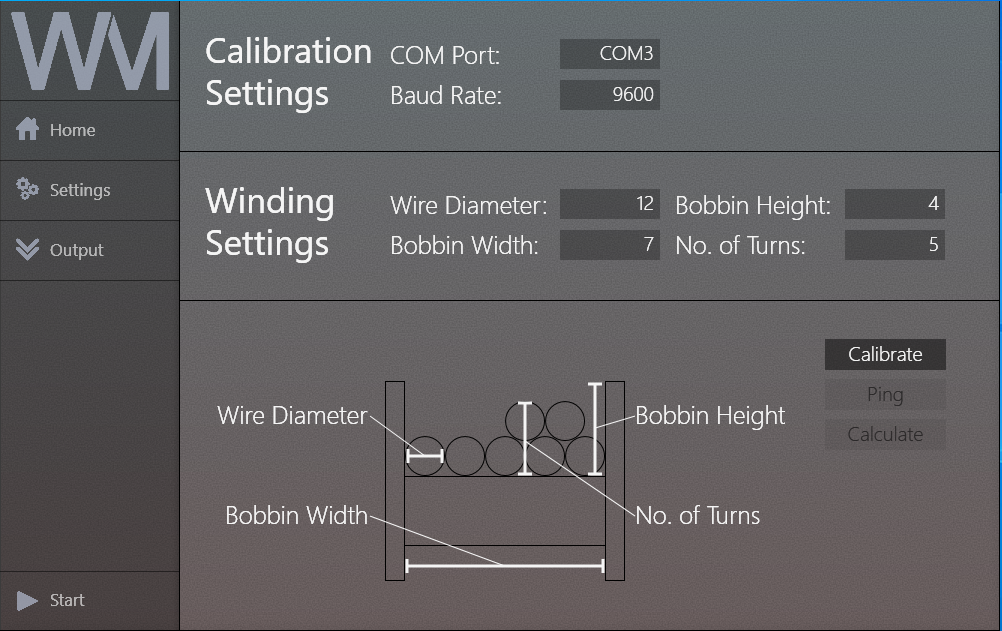
Coil Winding System
University Product Design
Coil Winding
University Product Design
In 2020, as part of my degree, teams were tasked with creating a coil winding system from scratch. My team decided to create an open bed model, to allow quick and easy prototyping or component replacement. This project required me to create a coil winding and serial communication program in C++ for use on a STM32 FR446RE microcontroller. By using stepper motors and a tensioning system, we were able to implement a simple velocity PID to maintain the speed between the input and output coils. This allowed for accurate winding and improved system reliability. In addition, I created a windows application using C# for the user to interface with, focusing on an intuitive and easy layout. The user settings would then be sent via UART serial to the microcontroller and applied.
Code
Microcontroller:
https://github.com/cjdyer/Coil-Winder-Control-Board
User Interface:
https://github.com/cjdyer/Coil-Winder-User-Interface
Contact Me.
- 0452 123 139
- cjdyer0@gmail.com